|
🚢 MAGPIE INSIGHTS – Part 1: Trajectory Planning
In the coming days, we will provide insights into the various functions that were demonstrated as part of the MAGPIE project.
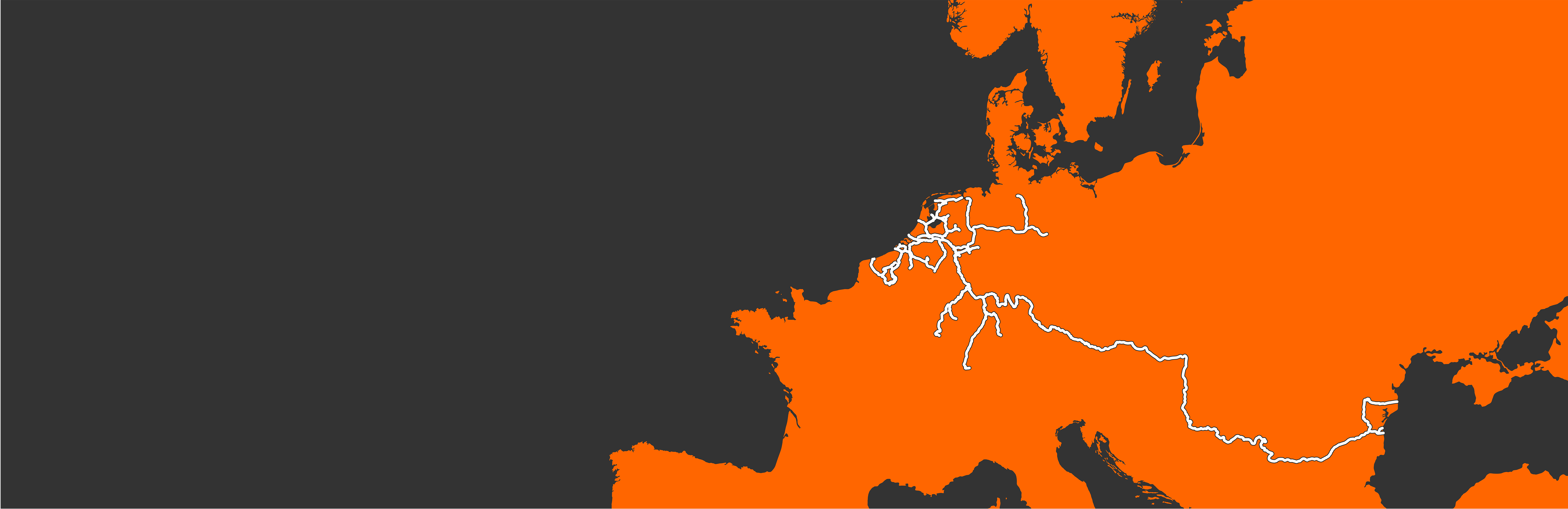
At the beginning, the destination was selected in the argoRadarPilot. Based on this input, a complete trajectory from the starting point to the destination was planned fully automatically. The video shows how such a highly complex task can be accomplished within just a few seconds.
In the next post, we will showcase autonomous departure from the berth. Stay tuned!
